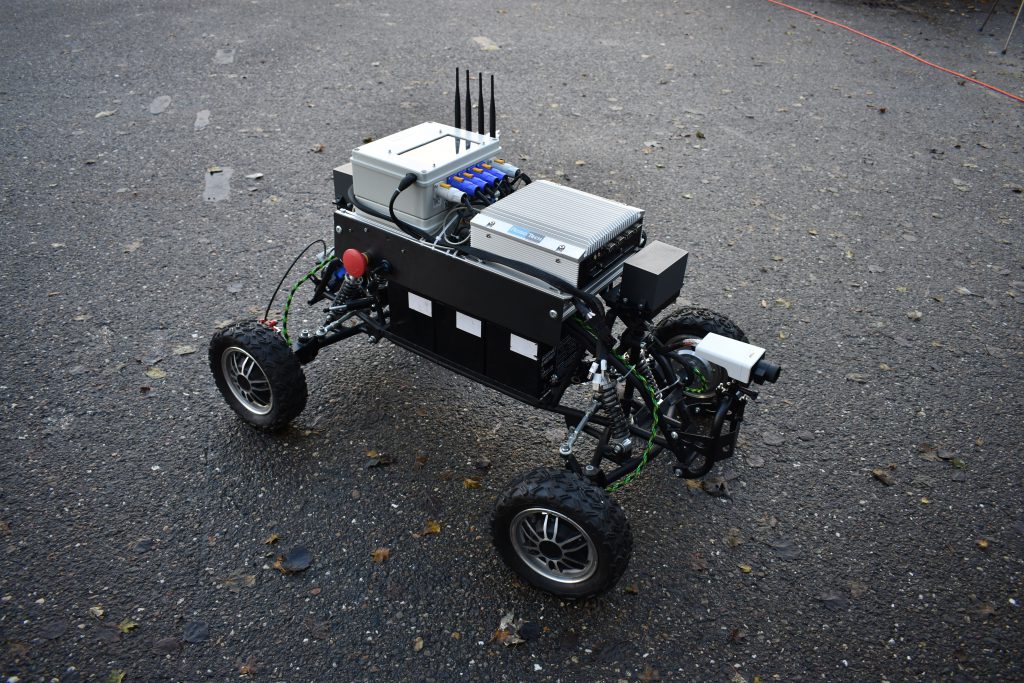
Mobilný robot, Androver 2, vyvinutý slovenskou firmou RoboTechVision sa nedávno vrátil z testovania v Európskej vesmírnej agentúre. Stretnutie sprostredkované Slovenskou organizáciou pre vesmírne aktivity sa konalo v novembri v Európskom vesmírnom výskumnom a technologickom centre v Holandsku. Rover sa mal pôvodne zúčastniť simulovanej marťanskej misie v habitate NASA HI-SEAS na úpätí havajskej sopky Mauna Loa, ktorú viedla slovenská marsonautka Michaela Musilová. Misia však bola zrušená a Androver 2 sa momentálne pripravuje na účasť v nadchádzajúcej simulovanej mesačnej misii pod záštitou ESA.

Hlavnou úlohou Androvera 2 v misii na Havaji mala byť kooperácia s astronautom. V súčasnosti je robot vybavený dvomi spôsobmi ovládania. Dokáže pracovať v manuálnom teleoperátorskom režime alebo v poloautonómnom režime.
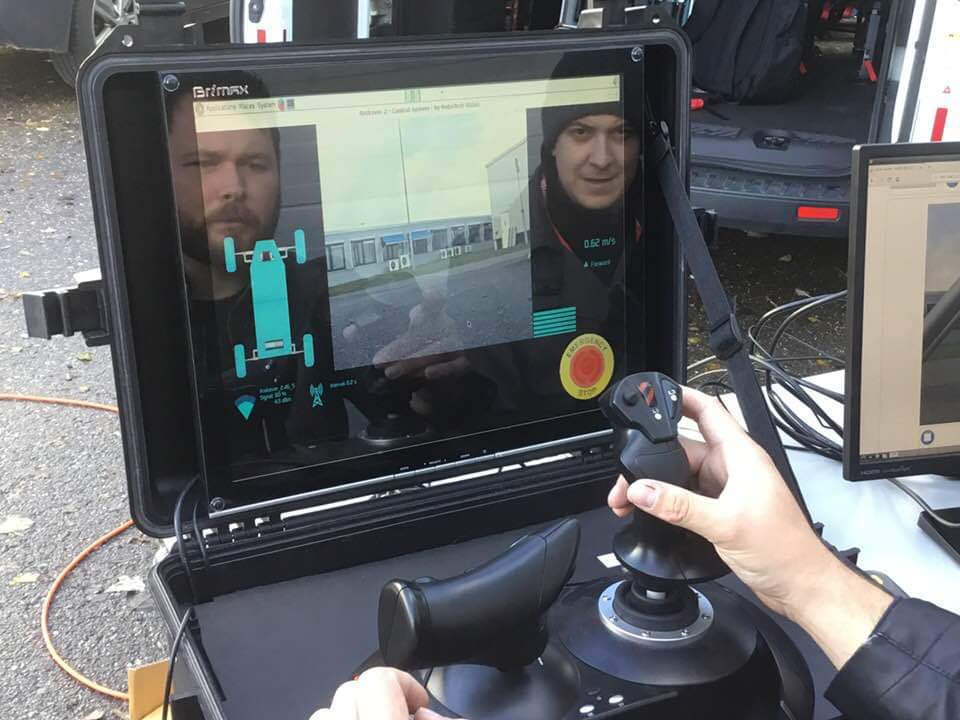
V teleoperátorskom režime sa Androver 2 bezdrôtovo riadi joystickom z kufra. V kufri je okrem joysticku aj displej zobrazujúci obraz z kamery, aktuálnu rýchlosť, natočenie náprav,úroveň signálu a stav pripojenia, ako aj ďalšie telemetrické údaje.
V poloautonómnom režime dokáže robot samostatne nasledovať astronauta a viezť namiesto neho náradie, nástroje alebo vedecké vzorky. Astronaut má na skafandri pripevnenú značku v tvare kruhu, ktorá je snímaná kamerou z robota. Palubný počítač potom spracuje obraz z kamery algoritmom, ktorý v ňom rozozná značku a z jej súradníc vypočíta natočenie náprav a svoju rýchlosť tak, aby bezpečne sledoval astronauta.
Priebeh testu
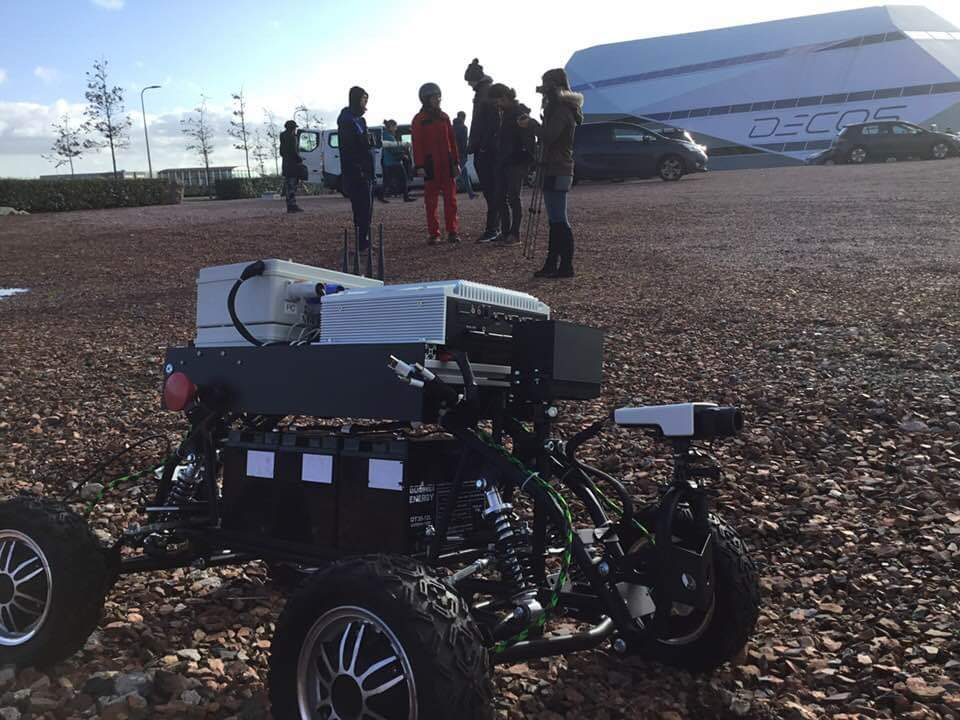
Tím technikov a vedcov z ESA sa zaujímal najmä o zdatnosť rovera v náročnom teréne a jeho schopnosť detailne preskúmať objekty kamerou. Prvá časť testu sa odohrala v zariadení pri centre spoločnosti DECOS, ktorého terén pripomínal povrch Marsu. Tu sa testovala najmä priechodnosť robota sypkým terénom, ale aj jeho presnosť pri analýze objektov v teleoperátorskom režime. Operátor mohol sledovať pohyb rovera iba prostredníctvom palubnej kamery. V kritických situáciách sa pomocou vysielačky riadil pokynmi astronautov, ktorí sledovali prácu rovera zblízka.
Budúca spolupráca
Androver 2 by sa mal najbližšie zúčastniť simulovanej mesačnej misie. O robota je záujem aj na simulovanej misii na Alpskom ľadovci vo Švajčiarsku. Okrem kooperácie s astronautom tu bude vykonávať aj ďalšie činnosti. Jednou z jeho úloh bude napríklad meranie vlastností pôdy a hornín spektrometrom upevneným na roveri či zbieranie vzoriek robotickým ramenom.
Najdôležitejšie technické údaje Androvera 2
dĺžka: 125 cm
šírka: 75 cm
typ podvozku: dvojitý Ackermann
hmotnosť bez nákladu: 50kg
maximálna hmotnosť nákladu: 40kg
pohon: výkon 4x500W dodávaný štyrmi BLDC elektromotormi umiestnenými vnáboji každého kolesa
doba prevádzky na jedno nabitie: 2 až 5 hodín v závislosti odzaťaženia a terénu
maximálna rýchlosť: elektronicky obmedzená na 4 m/s (konštrukčná 35 km/h)
Videá:
testovanie robota a prezentácia na konferencii VU Space Day v ESA: https://www.youtube.com/watch?v=8N4po6_UX7I
pohľad na teleoperátorské rozhranie: https://www.youtube.com/watch?v=qOIymcN3o4g
sledovanie značky robotom Husky: https://www.youtube.com/watch?v=_ytgnlVJZhw